 |
Ragione Sociale | CEEVER SRL
Via Battisti, 2 – 20090 Settala (MI) |
Pad. 5 – Stand C 13 |
| Settori Merceologici | 05.00 – manipolazione pezzi e utensili
36.00 – macchine per sbavatura e smussatura 79.00 – macchine e impianti per il trattamento e la finitura delle superfici 80.00 – macchine e impianti per trattamenti galvanici 81.00 – macchine e impianti per trattamenti termici 100.00 – sistemi e attrezzature |
||
| Profilo Aziendale | Nata nel Gennaio del 1959, Ceever si occupa della produzione d’impianti per il trattamento chimico-fisico delle superfici.
La produzione è molto vasta, si va dalle sabbiatrici ai tunnel di lavaggio, passando per gli impianti di fosfatazione, brunitura, decapaggio, ecc. Tutti gli impianti sono disponibili in 2 versioni, standard e speciale, pensata per rispondere alle specifiche necessità del cliente. Ceever assicura ai suoi clienti una assistenza qualificata nell’intero ciclo di utilizzo, grazie ai suoi tecnici specializzati, e garantisce inoltre un’ampia disponibilità di ricambistica. Opera nei settori automotive, aereo, lavorazioni meccaniche, trattamenti a caldo, oil & gas, apparecchi domestici, medicale, ferroviario, marittimo, macchine industriali, armiero, energia. |
||
| Prodotti in Fiera | Lavaggio e sbavatura ad alta precisione – Impianto Serie Tunnel CR.RR.
Caratterizzato dall’impiego di robot sia per il carico e scarico pezzi, sia per le operazioni di sbavatura, questo impianto è piuttosto interessante per chi necessita di un alto grado di pulizia anche con pezzi con forme particolarmente complesse che hanno punti difficilmente raggiungibili (è il caso ad esempio dei coperchi per alberi a camme dei motori delle automobili). Il sistema è composto da un robot antropomorfo con uno o più ugelli di spruzzatura fissati al polso. Il sistema lavora in un circuito ad alta pressione e risulta particolarmente interessante per processi di sbavatura delle bave pendule da lavorazione meccanica. Si tratta di una soluzione particolarmente versatile per future applicazioni in quanto permette di trattare pezzi con forme diverse mediante modifiche alla gestione software del robot. |
||
| Gallery | 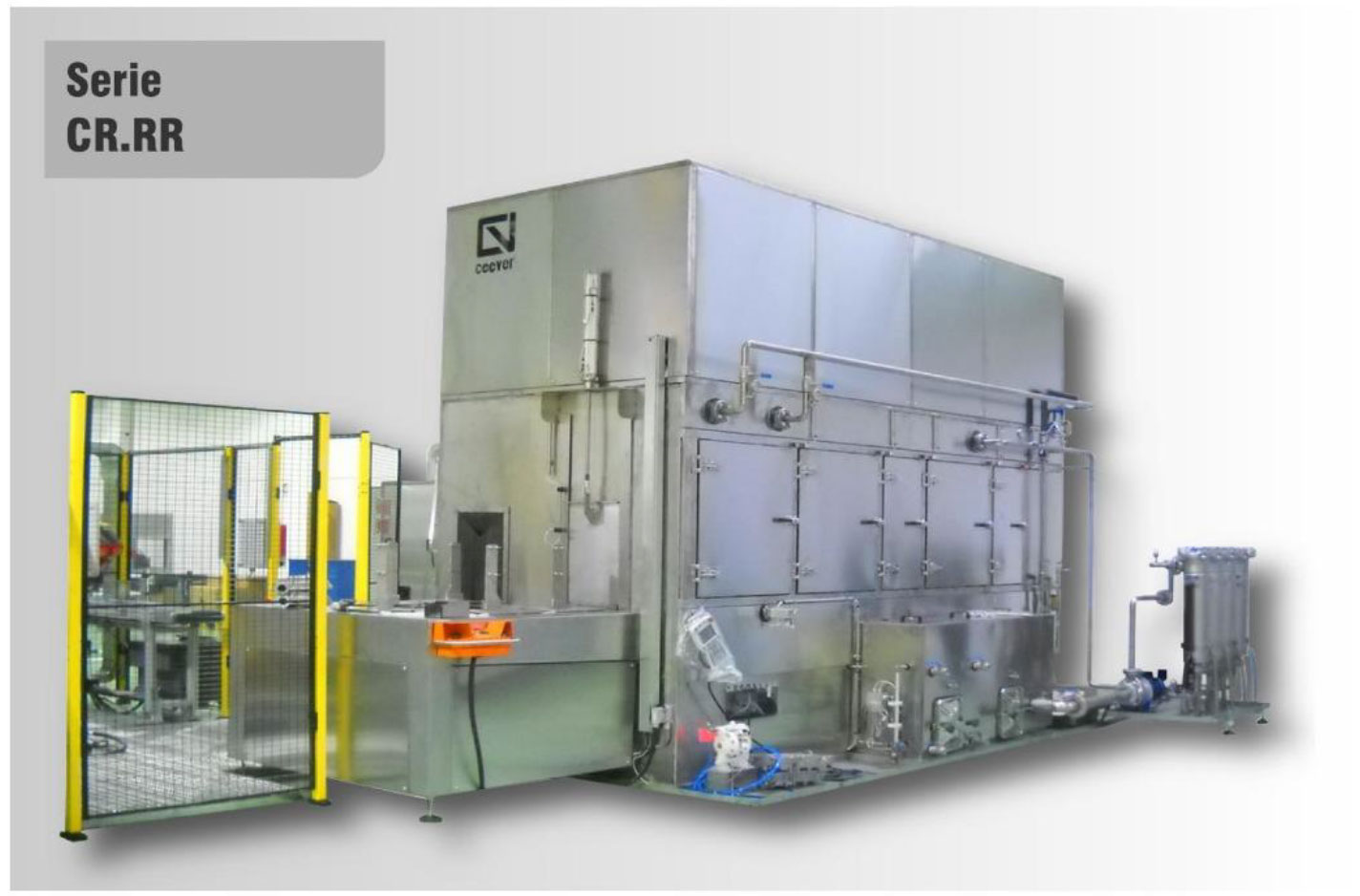
|
||
| Video | |||






